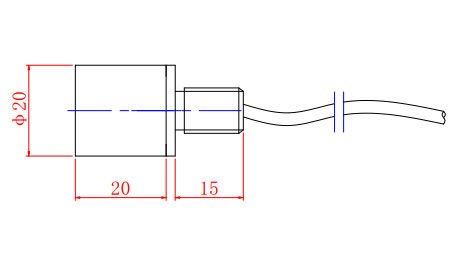
1Mhz Ultrasonic Depth Sensor HCTD1000KA Application:
● Locating
● Approach measurement
● Escaped obstruction
● Fish finder
Technical parameters:
| Model | Ultrasonic Depth Sensor HCTD1000KA |
|---|---|
| Working frequency(fr) | 1MHz ± 3% |
| Beam Angle(-3dB full open) | 6° |
| Band width | 10% |
| Comprehensive Sensitivity: 0dB=10 VP-p; Cycle:10; Distance: 7cm | -26dB min |
| shunt impedance (Minimum) | 110 ± 30% (Ω) |
| Static capacitance(pf) | 1300 ± 20% |
| Working Voltage (Maximize) Pulse Wave(duty cycle 2%) | <300V |
| Working Temperature | -20~70℃ |
| Case Material | ABS |
| MWP(Maximum working pressure) | 1.6MPa |
| IP Level | IP68 |
Ultrasonic transducers or ultrasonic sensors are a type of acoustic sensor divided into three broad categories: transmitters, receivers and transceivers. Transmitters convert electrical signals into ultrasound, receivers convert ultrasound into electrical signals, and transceivers can both transmit and receive ultrasound.
In a similar way to radar and sonar, ultrasonic transducers are used in systems which evaluate targets by interpreting the reflected signals. For example, by measuring the time between sending a signal and receiving an echo the distance of an object can be calculated. Passive ultrasonic sensors are basically microphones that detect ultrasonic noise that is present under certain conditions.
Ultrasonic probes and ultrasonic baths apply ultrasonic energy to agitate particles in a wide range of materials.
Ultrasound can also be used to make point-to-point distance measurements by transmitting and receiving discrete bursts of ultrasound between transducers. This technique is known as Sonomicrometry where the transit-time of the ultrasound signal is measured electronically (ie digitally) and converted mathematically to the distance between transducers assuming the speed of sound of the medium between the transducers is known. This method can be very precise in terms of temporal and spatial resolution because the time-of-flight measurement can be derived from tracking the same incident (received) waveform either by reference level or zero crossing. This enables the measurement resolution to far exceed the wavelength of the sound frequency generated by the transducers.
1Mhz Ultrasonic Depth Sensor Frequency – total resistance curve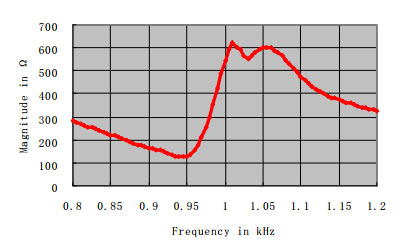
Frequency – phase Angle curve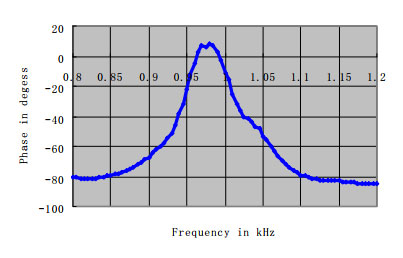
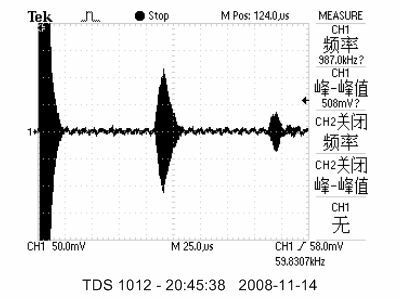
The sensitivity test
Launch voltage: 3Vp – p; Cycle: 8;Distance: 7 cm